爱因斯坦曾说:“羽生结弦之初,万物皆应生。万物皆可振动,可荡漾出光与旋律。” (注:作者中文译文)。在AI新技术革命的时代,大算力芯片也为自动驾驶ADS拨弦。在大算力的驱动下,大珠小珠这样的AI算法可以顺应时代潮流,解决了ADS从L2到L5逐步演进的诸多技术难题。 ADS每增加一级,计算能力需求就会增加十倍。 L4级别的预估算力需求为1000TOPS,L5级别预估为2000-10000TOPS。如图1所示,后摩尔时代,进程更新性能提升放缓,持续创新的边际收益递减,新兴的大规模算力架构层出不穷。再加上驱动AI算法的高速迭代演进,未来5-10年或许有可能。这将为后面的技术追赶者提供一个非常好的直线超车机会。
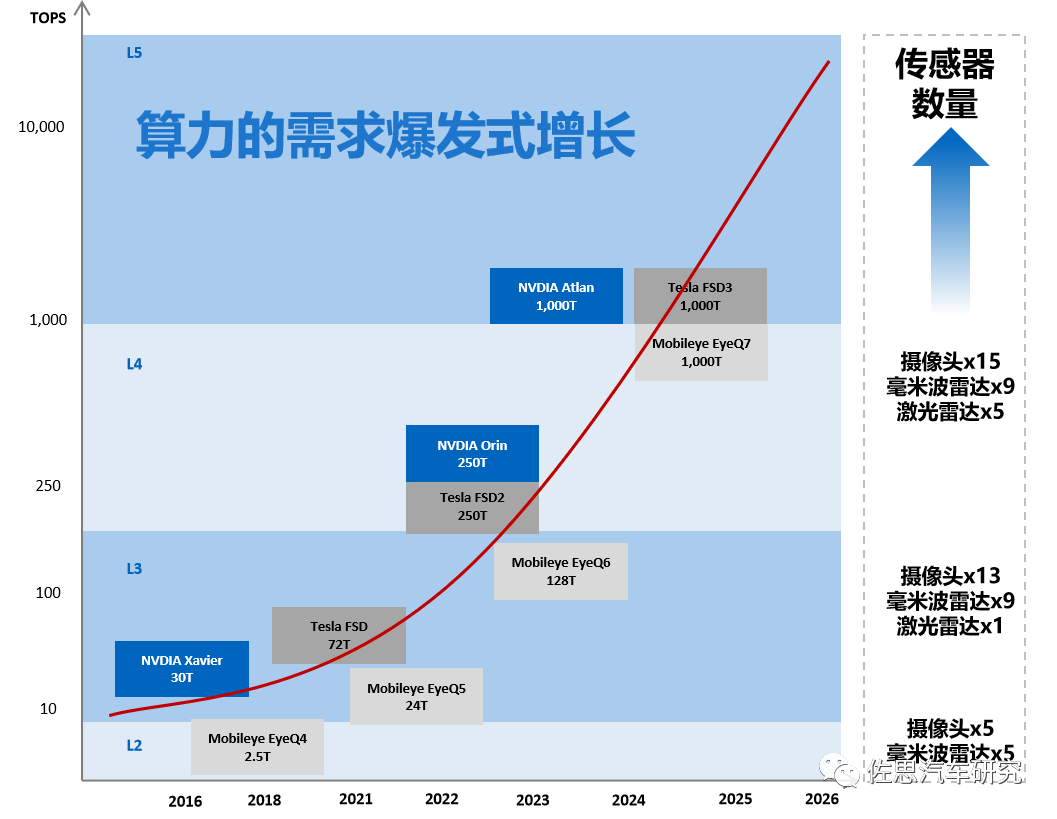
图1.大算力时代自动驾驶ADS领域的机遇与挑战
目前ADS自动驾驶采用后决策级融合的方法,其局限性主要体现在极端天气、复杂遮挡等不确定场景下单模结构化信息的提取,然后进行融合决策-制造。渠道信息会在不同层次上丢失,难以进行多模式有效互补和特征提取共享,计算能力复杂,性能远低于预期。
未来ADS算法将进入2.0的新阶段,即基于4D空间时空的多模态感知与融合推理,即特征提取/统计相结合推理/紧急情况预测,实现动态复杂噪声干扰等场景,全程安全高效无碰撞驾驶。挑战可以反映在人、车辆和物体的动态随机交互、天气和路况的变化以及意外的交通事件中。
ADS 算法2.0 已从决策后级融合转变为特征级预融合。当前行业ADS2.0算法的主要演进方向是:
ADS2.0算法演进和对算力的新需求可以概括为:
目前市面上主流算力NPU芯片存在几个常见问题。一是算法效率低,大部分只针对CNN进行优化(如3x3卷积)。二、内存墙问题:处理单元PE与存储和计算分离。数据难以共享;三是能耗墙问题:数据反复移动自动驾驶算力,能耗增加>30-70%。因此,目前针对某些特定算法的芯片无法解决未来ADS2.0的需求。
从工程实践来看,ADS2.0算法需要通过“硬件预嵌入、算法迭代、算力平衡”提供前向兼容的解决方案。 -10倍性能提升,100-500倍NPU性能提升)解决未来不确定性的算法演进:
未来自动驾驶算法不会止步于ADS2.0,而是真正支持人类自动驾驶梦想的算法的ADS3.0趋势,我们估计DNN 网络将用于端到端的学习。想象一下,有足够的专家驾驶数据用于模仿学习或RL自学习模式,可以有效减少数据标注的信息瓶颈和重度依赖,从而可以从多模态进行间接推理或类游戏多样化的数据层次。对抗性学习。 ADS 3.0 目前自动驾驶算力,该模型的可信度和可解释性仍远低于预期。 ADS系统的整体演进趋势可归纳如下:
➤从有限数量的相机设置转变为相机 + 激光雷达 + 雷达多模式组合。
➤从基于CNN+Rule的解决方案到CNN、RNN、Transformer、GNN、贝叶斯、深度强化学习、动态DNN、NAS生成的DNN、可变量化的DNN多算法组合。
在大算力时代,ADS系统首先模仿人类的驾驶行为。通过注意力机制,有望在感知、定位、预测、规划和控制等领域提供远超人类的决策能力。这就需要我们在人工智能的三个要素(算法、计算能力和数据)中加入第四个要素,知识或常识。

以上要素都需要在算法快速迭代的大趋势下具备足够的超大通用计算能力,ADS系统可以在离线模仿和学习人类驾驶先验知识的基础上提供在线仿真,经验和规则。自学习能力,通过自学习激励和博弈双赢策略应对诸多不确定的人机交互的复杂环境,可以安全应对决策不足的场景,提供可信的解读能力。此外,大算力芯片还需要能够利用额外的算力,为芯片中的数百万并行计算单元提供故障检测和安全规避能力,有效地检测和处理大型算力的部分或全部故障。多模式传感器的数量。 ,有效检测驾驶环境对传感器的主动攻击和外部目标的非主动干扰并做出实时决策。
作者罗博士拥有博士学位。东南大学工程学博士,英国布里斯托大学博士后。罗博士长期从事先进机器视觉产品的科学研究和开发。曾任ICT 500强公司机器视觉首席科学家。


